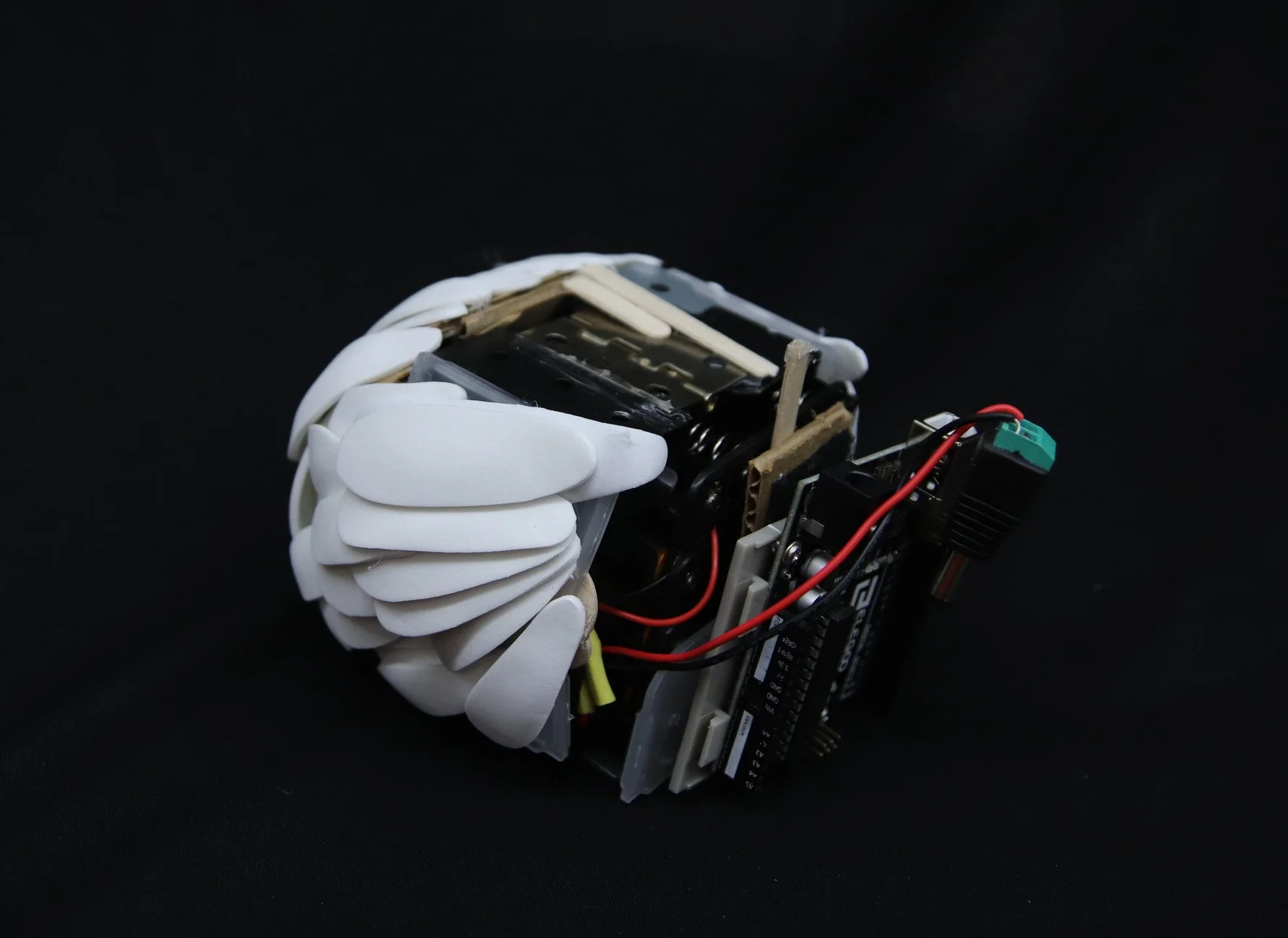
Materials: the display case is foam core board and the perch is wood. The puppet is sculpey with pins and wire for the joints. The top and bottom portions of the case contain an Arduino Uno and servos that control the motion. The box receives power from a cord plugged into an outlet in a nearby wall.
Code: The occurrence, speed and degree of movement are randomized within constraints that prevent the puppet from breaking.
Software: Arduino.
Programming Language: C++.
Duration: Five weeks.
Materials: Visual components done in watercolor on heavy drawing paper. Base and supports made of foam core and wood.
Mechanical Components: Rotation motion was generated through the use of micro servos and Adafruit stepper motors. The upward linear motion of the person and the motion of the dragon was created by creating a rail along which to control the rotation of the servo. the person is moved left to right atop a stepper motor which is supported on one end by two wheels(closest to viewer) and a track and gear system(back). The attachments for the servo track and stepper gear and track system were resized and 3D printed using Cura Ultimaker and a Monoprice Select Mini V2 3D printer. The chain and gear which control the fireballs was also 3D printed. A roller switch mounted near the chain is hit by a protrusion on one of the chain links every cycle which keeps the locations of the fireballs calibrated with the person moving along the track. Additional servos control the life bars, the person’s arm, the dragon’s mouth and the person in the window of the tower.
Software: Arduino, Cura Ultimaker.
Programming Language: C++.
Duration: Five weeks.